欧拉函数求质数 #include<iostream> using namespace std; typedef long long ll; const int N = 1e6 + 10; int euler, primes, cnt; bool st; void get_eulers(int n){ euler = 1; for(int i = 2; i <
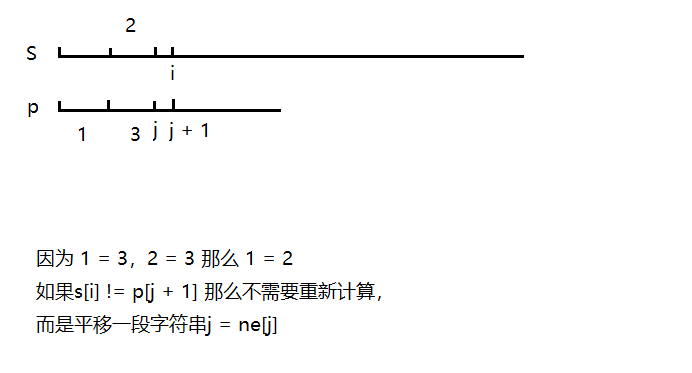
一、KMP是什么 KMP(Knuth-Morris-Pratt)算法是一种高效的字符串匹配算法,用于在文本中查找模式。它的核心思想是利用已经匹配的信息来避免重复匹配,从而提高效率。 二、暴力字符串匹配 暴时间复杂度O(n * m) //大概是这样的,可能有差别,但是模板基本上是这样 for (int i = 0; i < m;) { int j = 0; while (i < m &a